Abstract
The modular reconfigurable robot is composed of multiple similarly constructed modules. It can be disassembled and reconstructed to change its shape to adapt to different environments.
In this topic on implementation, we want to design a modular robot that can adapt to various environments. Genetic algorithm (GA) is applied to find the optimal parameters of the motors of the modular robot. Genetic algorithm is an evolutionary algorithm, which is inspired by biological evolution mechanisms, such as crossover, reproduction, and mutation. Through a similar mechanism, genetic algorithm can find the most suitable genes for "survival". We use V-REP software platform to simulate the robot's behavior and interaction with the environment. Genetic algorithm is used in simulation to “evolve” the robots.
In terms of the hardware, the shell and the structure of the robot are made with 3D printer. In the process of moving, modular robots can sense external environment with an ultrasonic sensor. Arduino works as the “brain” of each module and controls movements of the robot. In order to allow each module to communicate with each other while in action, we use Raspberry Pi as a communication bridge and connect to Bluetooth modules for message transmission via Python.
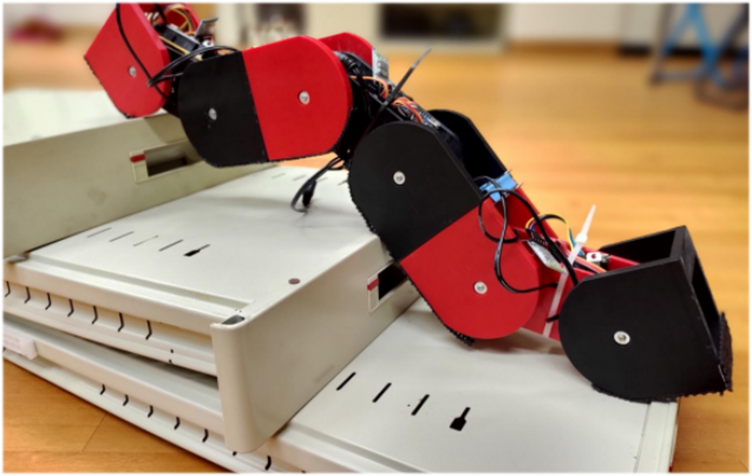
In the end, our modular robot is composed of three modules. They have the ability to crawl and climb stairs. Furthermore, they can change the action mode by sensing the external environment with ultrasonic sensors. We hope that in the future, modular robots can replace human beings in some cases, such as the exploration of disaster sites and the investigation of dangerous areas, etc. In this way, they can bring a safer life to humans.